Všechny kategorie
-
Integrované obvody (IC)
Integrované obvody (IC)
- Rozhraní - snímač, kapacitní dotyk(642)
- Specializované integrované obvody(12302)
- PMIC - regulátory napětí - speciální účel(5644)
- PMIC - Regulátory napětí - lineární regulátory(793)
- PMIC - Regulátory napětí - lineární + přepínání(1829)
- PMIC - regulátory napětí - lineární(70981)
- PMIC - Regulátory napětí - DC DC přepínání regulátorů(39569)
- PMIC - Regulátory napětí - DC DC Spínací řadiče(13507)
- PMIC - referenční napětí(9453)
- Převodníky PMIC - V / F a F / V(145)
- PMIC - tepelné řízení(592)
- PMIC - Supervizoři(47946)
- Převodníky PMIC - RMS na DC(170)
- PMIC - regulátory napájení, monitory(2104)
- Ovladače PMIC - Power Over Ethernet (PoE)(1008)
- PMIC - řízení spotřeby - specializované(7722)
- PMIC - přepínače napájení, ovladače zatížení(7706)
- PMIC - PFC (korekce výkonového faktoru)(1222)
- PMIC - OR regulátory, ideální diody(705)
- PMIC - Řídicí jednotky motorů(4712)
- PMIC - osvětlení, regulátory zátěže(560)
- PMIC - LED ovladače(7282)
- PMIC - Laserové ovladače(573)
- PMIC - Hot Swap Controllers(2816)
- PMIC - ovladače brány(7083)
- PMIC - Full, Half-Bridge Drivers(1342)
- PMIC - Měření energie(654)
- PMIC - Ovladače zobrazení(1435)
- PMIC - současná regulace / řízení(1481)
- PMIC - správa baterií(5553)
- PMIC - nabíječky baterií(3831)
- Převodníky PMIC - AC DC, přepínače offline(4905)
- Paměť - řadiče(358)
- Paměť - Konfigurační promy pro FPGA(639)
- Paměť - baterie(13)
- Paměť(65694)
- Logika - Funkce univerzální sběrnice(706)
- Logika - Překladatelé, Převodníky úrovní(2854)
- Logika - speciální logika(1870)
- Logika - přepínače signálu, multiplexery, dekodéry(9420)
- Logické - Shift Registers(2665)
- Logika - generátory parity a dámy(335)
- Logika - Multivibrátory(831)
- Logika - Západky(3658)
- Logika - brány a střídače - multifunkční, konfigurovatelná(1687)
- Logika - Brány a střídače(16453)
- Logika - žabky(7780)
- Logika - Paměť FIFO(4240)
- Logika - Čítače, děliče(3456)
- Logika - komparátory(592)
- Logic - buffery, ovladače, přijímače, vysílače(17835)
- Lineární - zpracování videa(2909)
- Lineární - komparátory(5084)
- Lineární - analogové multiplikátory, děliče(263)
- Lineární - zesilovače - video zesilovače a moduly(1905)
- Lineární - zesilovače - speciální účel(1856)
- Lineární - zesilovače - Instrumentace, OP zesilovače, vyrovnávací zesilovače(34236)
- Lineární - Zesilovače - Audio(4567)
- Rozhraní - Hlasový záznam a přehrávání(556)
- Rozhraní - UARTS (univerzální asynchronní vysílač přijímače)(1237)
- Rozhraní - Telecom(4467)
- Rozhraní - specializované(4833)
- Rozhraní - Terminátory signálu(333)
- Rozhraní - vyrovnávací paměti signálu, opakovače, rozdělení(1449)
- Rozhraní - serializátory, deserializátory(1480)
- Rozhraní - Rozhraní senzorů a detektorů(1524)
- Rozhraní - moduly(169)
- Rozhraní - modemy - integrované obvody a moduly(407)
- Rozhraní - rozšiřovače I / O(1136)
- Rozhraní - Filtry - aktivní(1226)
- Rozhraní - enkodéry, dekodéry, převodníky(714)
- Rozhraní - ovladače, přijímače, vysílače(20755)
- Rozhraní - Přímá digitální syntéza (DDS)(117)
- Rozhraní - řídicí jednotky(3628)
- Rozhraní - CODEC(1676)
- Rozhraní - analogové spínače, multiplexery, demultiplexery(12567)
- Rozhraní - analogové přepínače - speciální účel(2533)
- Embedded - Systém na čipu (SoC)(4496)
- Embedded - PLD (programovatelné logické zařízení)(971)
- Vestavěné - mikroprocesory(10083)
- Vestavěné - Mikrokontroléry - Specifické použití(2275)
- Vestavěné - Mikrokontroléry(99285)
- Vestavěné - mikrokontrolér, mikroprocesor, moduly FPGA(1527)
- Vestavěné - FPGA (pole programovatelné brány) s mikrokontroléry(81)
- Embedded - FPGA (pole programovatelné brány)(27747)
- Zabudované - DSP (procesory digitálního signálu)(4081)
- Embedded - CPLDS (komplexní programovatelná logická zařízení)(5187)
- Získávání dat - Řadiče dotykové obrazovky(1210)
- Sběr dat - digitální na analogové převaděče (DAC)(14419)
- Získávání dat - digitální potenciometry(6250)
- Sběr dat - analog k digitálním převodníkům (ADC)(17776)
- Data Acquisition - analogový front (AFE)(787)
- Sběr dat - ADCS/DACS - Zvláštní účel(3043)
- Hodiny / časování - Hodiny v reálném čase(2446)
- Hodiny/načasování - programovatelné časovače a oscilátory(23469)
- Hodiny / časování - baterie IC(4)
- Hodiny / Časování - Zpožděné linky(1049)
- Hodiny/načasování - generátory hodin, PLL, frekvenční syntetizátory(32775)
- Hodiny / Časování - Buffery hodin, Ovladače(4568)
- Hodiny / časování - Specifické použití(8652)
- Zvuk zvláštního účelu(1564)
Relevantní výrobce







-
Diskrétní polovodičové produkty
Diskrétní polovodičové produkty
- Aktuální regulace - diody, tranzistory(1090)
- Tranzistory - speciální účel(226)
- Tranzistory - programovatelná spojka(48)
- Tranzistory - JFET(1558)
- Tranzistory - IGBT - Single(4799)
- Tranzistory - IGBT - moduly(63420)
- Tranzistory - IGBT - pole(26)
- Tranzistory - FETs, MOSFETs - Single(48330)
- Tranzistory - FET, MOSFET - RF(4903)
- Tranzistory - FET, MOSFETy - Pole(6641)
- Transistory - bipolární (BJT) - single, předběžný(4539)
- Tranzistory - bipolární (BJT) - jednoduché(25800)
- Tranzistory - bipolární (BJT) - RF(2087)
- Tranzistory - bipolární (BJT) - matice, předběžné(2115)
- Tranzistory - bipolární (BJT) - pole(2310)
- Tyristory - TRIAC(4044)
- Tyristory - SCR - moduly(3967)
- Tyristory - SCR(5436)
- Tyristory - DIAC, SIDAC(319)
- Moduly výkonných ovladačů(1627)
- Diody - Zener - Single(87483)
- Diody - Zener - pole(2619)
- Diody - Variabilní kapacita (varicaps, varaktory)(1200)
- Diody - RF(2753)
- Diody - Usměrňovače - Jednoduché(67528)
- Diody - usměrňovače - pole(20581)
- Diody - můstkové usměrňovače(11700)
Relevantní výrobce




-
RF / IF a RFID
RF / IF a RFID
- Karty identifikačního modulu předplatitele (SIM)(77)
- RF cirkulátory a izolátory(1742)
- RFID, přístup RF, sledování integrovaných obvodů(1550)
- Transpondéry RFID, tagy(747)
- Moduly čtečky RFID(464)
- Soupravy pro hodnocení a vývoj RFID, desky(30)
- RFID antény(329)
- RFI a EMI - stínící a absorpční materiály(6444)
- RFI a EMI - kontakty, prsty a těsnění(7497)
- Vysílače RF(668)
- Moduly RF vysílače(6900)
- Integrované obvody transceiveru RF(4169)
- RF přepínače(9276)
- RF štíty(16401)
- RF přijímače(1998)
- RF přijímač, vysílač a transceiver dokončili jednotky(2763)
- Rozdělovače / rozbočovače RF(1223)
- Integrované obvody regulátoru výkonu(86)
- RF modulátory(710)
- RF Mixéry(2800)
- Různé integrované obvody a moduly(3276)
- RF přední konec (LNA + PA)(419)
- RF hodnocení a vývojové soupravy, desky(747)
- RF směrový spojka(2718)
- RF rozbočovače(1464)
- RF detektory(412)
- RF demodulátory(249)
- RF antény(12319)
- RF zesilovače(19651)
- Balun(1496)
- Attenuátory(4852)
Relevantní výrobce






-
Optoelektronika
Optoelektronika
- Optomechanical(480)
- Osvětlovací tělesa(125)
- Laserové diody, laserové moduly - dodávka laseru, laserová vlákna(345)
- Hene laserové systémy(31)
- Hene Laser Heads(27)
- Zobrazit podsvícení(93)
- Xenonové osvětlení(387)
- Dotykové obrazovky(453)
- Panelové indikátory, pilotní světla(75729)
- Optika - dálkový světelný zdroj fosforu(269)
- Optika - Reflektory(665)
- Optika - lehké trubky(5384)
- Optika - Objektivy(4951)
- LED diody - Rozdělovače, Standoffs(2718)
- LED diody - výměna lampy(29718)
- LED diody - indikátory desky obvodů, pole, světelné pruhy, sloupcové grafy(9083)
- LED tepelné produkty(667)
- LED osvětlovací soupravy(64)
- LED osvětlení - bílá(37580)
- LED osvětlení - barva(4728)
- LED osvětlení - COB, motory, moduly(28735)
- Indikace LED - diskrétní(27601)
- Laserové diody, moduly(1553)
- Svítidla - žárovky, neony(311004)
- Lampy - studená katoda fluorescenční (CCFL) & amp;UV(164)
- Invertory(7728)
- Infračervené, UV, viditelné emise(3871)
- Optika vláken - vysílače - Integrované obvody pohonu(4085)
- Optická vlákna - Vysílače - Diskrétní(350)
- Optická vlákna - Moduly transceiveru(18758)
- Fiber Optics - přepínače, multiplexery, demultiplexery(1387)
- Optická vlákna - přijímače(695)
- Optická vlákna - Attenuátory(654)
- Elektroluminiscenční(102)
- Displej, monitor - rozhraní rozhraní(98)
- Displejové moduly - Vakuové zářivky (VFD)(249)
- Displejové moduly - LED Dot Matrix a cluster(865)
- Moduly displeje - znaky LED a číselné znaky(5421)
- Moduly displeje - LCD, OLED, grafické(4654)
- Moduly zobrazení - LCD, OLED znak a číselné(2202)
- Obrazovky, objektivy(88)
- Adresovatelný, specialita(458)
Relevantní výrobce







-
Snímače, převodníky
Snímače, převodníky
- Ultrazvukové přijímače, vysílače - průmyslové(115)
- Senzory teploty - termostaty - mechanické - průmyslové(3103)
- Senzory teploty - analogové a digitální výstup - průmyslový(209)
- Senzory blízkost - průmyslové(13611)
- Tlakové senzory, převodníky - průmyslové(26503)
- Optické senzory - fotonika - čítače, detektory, SPCM (modul pro počítání jednoho fotonu)(751)
- Optické senzory - moduly fotoaparátu(875)
- Magnetické senzory - poloha, blízkost, rychlost (moduly) - průmyslové(554)
- Senzory síly - průmyslové(346)
- Flow Sensors - Industrial(151)
- Plovák, úrovně senzorů - průmyslové(310)
- Kodéry - průmyslové(4980)
- Barevné senzory - průmyslové(50)
- Touch Sensors(100)
- Ultrazvukové přijímače, vysílače(2421)
- Snímače teploty - termostaty - pevný stav(1096)
- Teplotní snímače - Termostaty - Mechanické(3397)
- Senzory teploty - termočlánky, teplotní sondy(1921)
- Snímače teploty - RTD (detektor teploty odporu)(1525)
- Snímače teploty - termistory PTC(2273)
- Snímače teploty - NTC termistory(13259)
- Snímače teploty - analogový a digitální výstup(3928)
- Tenzometry(1399)
- Specializované snímače(1861)
- Solární články(503)
- Šokové snímače(84)
- Rozhraní snímače - spojovací bloky(2519)
- Kabel senzoru - sestavy(22011)
- Senzory blízkost/obsazenost - hotové jednotky(725)
- Snímače přiblížení(2860)
- Snímače tlaku, převodníky(11317)
- Snímače polohy - úhel, měření lineární polohy(6022)
- Optické senzory - Reflexní - logický výstup(194)
- Optické senzory - Reflexní - Analogový výstup(432)
- Optické snímače - fototranzistory(1027)
- Optické senzory - PhotoInterRupters - Typ slotů - Tranzistorový výstup(1427)
- Optické senzory - PhotoInterRupters - Typ slotů - Logický výstup(1215)
- Optické senzory - fotoelektrické, průmyslové(16763)
- Optické snímače - fotodiody(1543)
- Optické senzory - detektory fotografií - vzdálený přijímač(2605)
- Optické senzory - detektory fotografií - logický výstup(146)
- Optické senzory - detektory fotografií - CDS buňky(74)
- Optické snímače - měření vzdálenosti(377)
- Optické snímače - okolní světlo, IR, UV senzory(1305)
- Multifunkční zařízení(558)
- Snímače pohybu - vibrace(337)
- Snímače pohybu - sklopné spínače(67)
- Snímače pohybu - optické(719)
- Snímače pohybu - Inclinometry(175)
- Motion Sensors - IMUS (inerciální měřicí jednotky)(416)
- Snímače pohybu - Gyroskopy(214)
- Snímače pohybu - akcelerometry(1911)
- Magnety - přizpůsobený snímač(119)
- Magnety - víceúčelové(1965)
- Magnetické snímače - spínače (pevný stav)(3700)
- Magnetické senzory - poloha, blízkost, rychlost (moduly)(5199)
- Magnetické snímače - lineární, kompasové (IC)(1247)
- Magnetické senzory - kompas, magnetické pole (moduly)(35)
- Převodníky LVDT (lineární diferenciální transformátor s variabilním diferenciálem)(204)
- Moduly transceiveru IrDA(196)
- Obrazové snímače, fotoaparát(2235)
- Vlhkost, snímače vlhkosti(1425)
- Plynové senzory(1217)
- Senzory síly(188)
- Snímače průtoku(550)
- Plovákové hladinoměry(1343)
- Kodéry(6357)
- Snímače prachu(43)
- Proudové měniče(3455)
- Senzory barev(85)
- Zesilovače(1905)
Relevantní výrobce







-
Konektory, propojovací kabely
Konektory, propojovací kabely
- Konektory USB, DVI, HDMI(446)
- Světelné konektory v pevném stavu(555)
- Zásuvky pro ICS, tranzistory(953)
- Konektory pluggable(1221)
- Konektory fotovoltaického (solárního panelu)(136)
- Konektory optických vláken(370)
- FFC, FPC (ploché flexibilní) konektory(761)
- D-sub, konektory ve tvaru D(2887)
- Koaxiální konektory (RF)(2389)
- Kruhové konektory(14162)
- Napájecí konektory typu čepele(273)
- Zástrčky a nádoby(2597)
- Konektory USB, DVI, HDMI - Adaptéry(572)
- Konektory USB, DVI, HDMI(4298)
- Terminály - konektory kabelové a deskové(217)
- Terminály - Konektory pro splétání drátu(4322)
- Konektory - Konektory konektorů(328)
- Terminály - konektory pro věžičky(1273)
- Terminály - Specializované konektory(2042)
- Terminály - Spádové konektory(3902)
- Terminály - Pájecí konektory(345)
- Terminály - šroubové konektory(745)
- Terminály - kroužkové konektory(12596)
- Terminály - Obdélníkové konektory(4747)
- Terminály - rychlé připojení, konektory rychlého odpojení(8514)
- Terminály - pin PC, jednotlivé konektory(3776)
- Terminály - Konektory PC Pin, Konektory zásuvek(5883)
- Terminály - Konektory magnetického drátu(1653)
- Terminály - Konektory nožů(112)
- Terminály - pouzdra, boty(2850)
- Terminály - Konektory fólií(108)
- Terminály - barel, kuličkové konektory(1107)
- Terminály - adaptéry(137)
- Terminálové lišty a věžové desky(1159)
- Terminálové spojovací systémy(2533)
- Terminálové bloky - drát na desce(43615)
- Terminálové bloky - specializované(3722)
- Svorky - distribuce napájení(847)
- Svorkovnice - montáž na panel(1359)
- Svorkovnice - Moduly rozhraní(1819)
- Svorky - zásuvky, zástrčky a zásuvky(119920)
- Svorkovnice - DIN, kolejnice(9373)
- Svorky - kontakty(65)
- Svorné bloky - bariérové bloky(47517)
- Svorky - adaptéry(1059)
- Konektory pevného osvětlení - kontakty(271)
- Světelné konektory v pevném stavu(1344)
- Zásuvky pro ICS, tranzistory - adaptéry(275)
- Zásuvky pro ICS, tranzistory(22148)
- Shunts, Jumpery(907)
- Obdélníkové konektory - pružinové zátěže(7721)
- Obdélníkové konektory - pouzdra(43023)
- Obdélníkové konektory - záhlaví, speciální pin(6129)
- Obdélníkové konektory - zásuvky, zásuvky, zásuvky(229601)
- Obdélníkové konektory - záhlaví, samčí kolíky(543338)
- Obdélníkové konektory - zavěšení zdarma, montáž panelu(30142)
- Obdélníkové konektory - kontakty(10681)
- Obdélníkové konektory - deska in, přímý dráty na desku(2432)
- Obdélníkové konektory - adaptéry(475)
- Obdélníkový - deska na konektory na desce - záhlaví, nádoby, ženské zásuvky(9)
- Obdélníkové - Konektory desky - desky, zástrčky(2)
- Obdélníkové konektory - rozpěrky desky, stohovače (deska na desku)(238901)
- Obdélníkové konektory - pole, typ okraje, mezzanin (deska na desku)(37853)
- Vstupní konektory - vstupy, výstupy, moduly(10310)
- Konektory pluggable(6049)
- Konektory fotovoltaického (solárního panelu) - kontakty(77)
- Konektory fotovoltaického (solárního panelu)(504)
- Modulární konektory - vodiče(99)
- Modulární konektory - konektory(1674)
- Modulární konektory - pouzdra konektorů(181)
- Modulární konektory - konektory s magnetikou(10152)
- Modulární konektory - konektory(23416)
- Modulární konektory - adaptéry(855)
- Paměťové konektory - Karty PC - Adaptéry(21)
- Konektory paměti - zásuvky PC Card(3299)
- Paměťové konektory - Inline modulové zásuvky(3390)
- Konektory LGH(764)
- Keystone - vložky(2758)
- Keystone - čelní desky, rámečky(1926)
- Konektory pro vysoké zatížení - vložky, moduly(4190)
- Spojky s těžkým vývojem - House, kapuce, základny(17226)
- Heavy Duty konektory - rámy(523)
- Konektory pro vysoké zatížení - kontakty(1832)
- Heavy Duty konektory - sestavy(671)
- Konektory s optickými vlákny - pouzdra(919)
- Konektory s optickými vlákny - adaptéry(4455)
- Konektory optických vláken(3001)
- Konektory FFC, FPC (Ploché ohebné) - pouzdra(652)
- FFC, FPC (ploché ohebné) konektory - kontakty(202)
- FFC, FPC (ploché flexibilní) konektory(18691)
- D-Sub, konektory ve tvaru "D" - terminátory(47)
- D-Sub, konektory ve tvaru "D" - pouzdra(12238)
- D-Sub, konektory tvaru D - kontakty(2714)
- D-Sub, konektory ve tvaru D - konektory, kapoty(5995)
- D-Sub, konektory ve tvaru "D" - adaptéry(1304)
- Konektory D-Sub(141346)
- Konektory ve tvaru D - Centronics(8770)
- Kontakty, pružinové zatížení a tlak(630)
- Kontakty - víceúčelové(6196)
- Kontakty - Leadframe(122)
- Koaxiální konektory (RF) - Terminátory(1231)
- Koaxiální konektory (RF) - kontakty(480)
- Koaxiální konektory (RF) - Adaptéry(6386)
- Koaxiální konektory (RF)(25734)
- Kruhové konektory - pouzdra(441226)
- Kruhové konektory - kontakty(4737)
- Kruhové konektory - zadní a kabelové svorky(53692)
- Kruhové konektory - adaptéry(8839)
- Kruhové konektory(1196254)
- Konektory okrajů karet - pouzdra(469)
- Konektory okrajů karet - Konektory okrajové desky(672683)
- Konektory konektoru karty - kontakty(325)
- Konektory konektoru karty - adaptéry(73)
- Typ konektoru napájecího konektoru - pouzdra(837)
- Typ konektoru napájecího konektoru - kontakty(393)
- Napájecí konektory typu čepele(4163)
- Mezi adaptéry řady(649)
- Zástrčky - napájecí konektory(935)
- Barrel - Audio konektory(2432)
- Barrel - Audio adaptéry(92)
- Konektory banánů a špiček - konektory, zástrčky(1644)
- Konektory pro banány a hroty - vazné sloupky(239)
- Konektory pro banány a hroty - adaptéry(75)
- Konektory propojovacího panelu - specializované(45586)
- Konektory propojovacích desek - pouzdra(6863)
- Konektory zadního roušky - tvrdá metrika, standardní(6297)
- Konektory zásuvky - DIN 41612(9408)
- Konektory propojovacího panelu - kontakty(3583)
- Konektory zásuvky - vložky ARINC(2357)
- Konektory propojovací - ARINC(3789)
Relevantní výrobce







-
Rezistory
-
Kondenzátory
Kondenzátory
- Hliníkové elektrolytické kondenzátory(16817)
- Trimry, variabilní kondenzátory(3151)
- Kondenzátory tenkého filmu(3473)
- Tantalové kondenzátory(136103)
- Tantalové - polymerní kondenzátory(9778)
- Silikonové kondenzátory(320)
- Kondenzátory oxidu niobového(330)
- Kondenzátory slídy a PTFE(9101)
- Filmové kondenzátory(150406)
- Elektrické kondenzátory s dvojitou vrstvou (EDLC), SuperCapatitors(2782)
- Keramické kondenzátory(833829)
- Kondenzátorové sítě, pole(2383)
- Hliníkové elektrolytické kondenzátory(125325)
- Hliník - kondenzátory polymerů(7544)
Relevantní výrobce






-
Transformátory
-
Izolátory
-
Krystaly, oscilátory, rezonátory
-
Spínače
Spínače
- Přepínače blokovacích přepínačů(2893)
- Přepínače nouzového zastávky (E-Stop)(1160)
- Kabelové tažné spínače(571)
- Přepínací přepínače(33608)
- Přepínače otočného spínače(742)
- Tactile Switches(14263)
- Snap Action, Limit Switches(28077)
- Slide Switches(5166)
- Přepínače selektoru(9720)
- Rotační spínače(13850)
- Kolébkové spínače(53790)
- Tlačítkové spínače - Hall Effect(127)
- Tlačítkové spínače(190826)
- Programovatelné přepínače displeje(39)
- Navigační spínače, Joystick(1882)
- Magnetické, jazýčkové spínače(1399)
- Klávesové přepínače(637)
- Keylock Switches(3684)
- Přepínače DIP(7747)
- Konfigurovatelné součásti přepínače - čočka(1435)
- Konfigurovatelné komponenty přepínače - zdroj osvětlení(1236)
- Konfigurovatelné komponenty přepínače - kontaktní blok(1401)
- Konfigurovatelné komponenty přepínače - tělo(16077)
- Odpojte komponenty přepínače(2567)
Relevantní výrobce






-
Relé
Relé
- Bezpečnostní relé(1310)
- Reedové relé(1735)
- Vysokofrekvenční (RF) relé(1190)
- Stykače (pevný stav)(686)
- Stykače (elektromechanické)(11952)
- Automobilové relé(1881)
- Relé v pevné fázi(10652)
- Signálové relé, Až 2 zesilovače(9149)
- Reléové zásuvky(2075)
- Výkonové relé, více než 2 zesilovače(31604)
- Moduly relé I / O(712)
- Vstupní / výstupní reléové moduly - Vstup(2)
- Rozvaděče modulů relé I / O(247)
Relevantní výrobce





























Zvolte jazyk
Aktuální jazyk
Čeština
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Průvodce pracovním principem krokového motoru 28BYJ-48
Čas: 2026/05/12
Prohlížet: 101
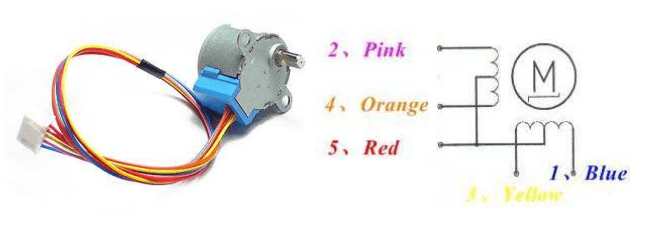
28BYJ-48 je malý 5V krokový motor běžně používaný v Arduino, ESP32, Raspberry Pi, robotice a DIY automatizačních projektech.Na rozdíl od normálního stejnosměrného motoru, který se volně otáčí, se 28BYJ-48 pohybuje v malých kontrolovaných krocích, což je užitečné pro přesné polohování.Tento článek bude hovořit o pinoutu krokového motoru 28BYJ-48, specifikacích, funkcích, principu práce, aplikacích a dalších.

Katalog
Pinout a funkce
|
Pin/Wire
Barva |
Funkce |
Popis |
|
Modrá |
Cívka A |
Připojeno k jednomu
konec první cívky motoru |
|
Růžová |
Cívka B |
Připojeno k jednomu
konec druhé cívky motoru |
|
Žlutá |
Cívka C |
Připojeno k jednomu
konec třetí motorové cívky |
|
Oranžová |
Cívka D |
Připojeno k jednomu
konec čtvrté motorové cívky |
|
Červená |
Běžné VCC |
Společné pozitivní
napájecí vedení sdílené všemi vnitřními cívkami |
Specifikace krokového motoru 28-BYJ48
|
Parametr |
Specifikace |
|
Model |
28BYJ-48 – 5V |
|
Jmenovité napětí |
5V DC |
|
Počet fází |
4 |
|
Variace rychlosti
Poměr |
1/64 |
|
Úhel kroku |
5,625° / 64 |
|
Frekvence |
100 Hz |
|
DC odpor |
50Ω ±7% (25°C) |
|
Idle In-Traction
Frekvence |
> 600 Hz |
|
Nečinný
Out-trakční frekvence |
> 1000 Hz |
|
In-Traction
Točivý moment |
>34,3 mN·m
(120 Hz) |
|
Vlastní polohování
Točivý moment |
>34,3 mN·m |
|
Třecí moment |
600–1200 gf·cm |
|
Zátahový moment |
300 gf·cm |
|
Izolované
Odpor |
>10 MΩ (500 V) |
|
Izolované
Elektřina Power |
600VAC / 1mA /
1s |
|
Stupeň izolace |
třída A |
|
Nárůst teploty |
<40K (120Hz) |
|
Úroveň hluku |
<35dB (120Hz,
bez zatížení, 10 cm) |
Vlastnosti krokového motoru 28-BYJ48
|
Funkce |
Popis |
|
Kompaktní velikost |
Malé a
lehký design vhodný pro vestavěné systémy a DIY elektronické projekty |
|
Provoz 5V |
Funguje pomocí a
nízké napájení 5V DC, díky čemuž je kompatibilní s Arduino a mikrokontroléry |
|
Vysoká pozice
Přesnost |
Poskytuje přesné
krok za krokem ovládání rotace |
|
Vestavěné zařízení
Snížení |
Používá interní
Redukční převodovka 1:64 pro lepší točivý moment a polohování |
|
Nízká hlučnost
Provoz |
Vyrábí
relativně tichý pohyb během provozu |
|
Dobré držení
Točivý moment |
Lze udržovat
poloha hřídele při napájení |
|
Snadný ovladač
Kompatibilita |
Běžně používané
s deskami ovladačů ULN2003 |
|
Nízký výkon
Spotřeba |
Vhodné pro
bateriově napájené a nízkoenergetické aplikace |
|
Kontinuální
Možnost otáčení |
Může se otáčet
průběžně se správnou krokovou kontrolou |
|
Vhodné pro začátečníky |
Široce používané v
vzdělávací projekty elektroniky a robotiky |
Jak funguje krokový motor 28-BYJ48
28-BYJ48 je unipolární krokový motor navržený tak, aby se otáčel malými, přesnými úhlovými pohyby nazývanými kroky.Na rozdíl od běžného stejnosměrného motoru, který se nepřetržitě otáčí, když je připojeno napájení, se tento motor pohybuje v řízené rotaci krok za krokem postupným nabíjením svých vnitřních cívek.
Uvnitř motoru jsou čtyři elektromagnetické cívky uspořádané kolem rotoru s permanentním magnetem.Když elektrický proud protéká jednou cívkou, vytváří magnetické pole, které přitahuje rotor směrem k této poloze.Budicí obvod pak nabudí další cívku, což způsobí, že se rotor opět mírně pohne.Nepřetržitým přepínáním sekvence cívek se rotor otáčí v malých řízených krocích.
Motor běžně používá řídicí desku ULN2003, protože mikrokontrolér, jako je Arduino, nemůže přímo dodávat dostatek proudu pro bezpečné řízení cívek.Ovladač přijímá řídicí signály z mikrokontroléru a zapíná a vypíná cívky motoru ve správném pořadí.
28-BYJ48 obsahuje také vnitřní redukční převodovku s poměrem přibližně 1:64.Tato redukce převodu zvyšuje výstupní točivý moment a zároveň zlepšuje přesnost polohování, i když snižuje rychlost otáčení.Díky této převodovce je motor vhodný pro aplikace vyžadující přesný pohyb při nízkých otáčkách spíše než vysokorychlostní rotaci.
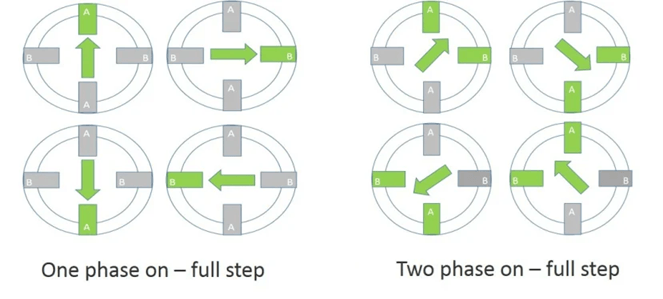
Motor může pracovat v několika krokových režimech, včetně plného a polovičního kroku.V režimu plného kroku se mohou dvě cívky napájet společně pro vyšší točivý moment.V režimu polovičního kroku motor střídá aktivaci s jednou a dvěma cívkami, čímž se dosáhne hladšího a přesnějšího pohybu.
Typická sekvence aktivace cívky je:
|
Krok |
Cívka
Aktivováno |
|
1 |
Modrá |
|
2 |
Růžová |
|
3 |
Žlutá |
|
4 |
Oranžová |
Opakováním této sekvence se motor otáčí jedním směrem, zatímco obrácením pořadí se směr otáčení mění.
Protože se motor pohybuje v pevných krocích namísto nepřetržitého otáčení, je široce používán v polohovacích systémech, jako je robotika, posuvné kamery, chytré zámky, automatické žaluzie a malé automatizační projekty, kde je důležité přesné řízení pohybu.
28BYJ-48 Systém redukce převodů
28BYJ-48 používá vnitřní převodovku s redukčním poměrem přibližně 1:64.Tato redukce převodu snižuje výstupní otáčky motoru a zároveň zvyšuje točivý moment a přesnost polohování.Díky tomuto systému se motor může pohybovat plynuleji a lépe držet svou polohu při provozu při nízkých otáčkách.
Převodovka také pomáhá motoru efektivněji zvládat lehké mechanické zatížení ve srovnání s mikrokrokovým motorem s přímým pohonem.Snížená rychlost jej však činí méně vhodným pro vysokorychlostní rotační aplikace.
Unipolární vs bipolární operace v 28BYJ-48
|
Parametr |
Unipolární
28BYJ-48 |
bipolární
Upraveno 28BYJ-48 |
|
Elektroinstalace motoru |
Používá 5 drátů |
Upraveno na 4
dráty |
|
Středový kohoutek |
Používá běžné
středový odbočný drát |
Středový kohoutek
odpojeno |
|
Typ ovladače |
ULN2003 ovladač
deska |
A4988, DRV8825,
nebo bipolární ovladače |
|
Kontrolní metoda |
Jednodušší cívka
přepínání |
Složitější
Ovládání H-můstku |
|
Výstup točivého momentu |
Nižší točivý moment |
Vyšší točivý moment |
|
Energetická účinnost |
Nižší účinnost |
lépe
účinnost |
|
Aktuální tok |
Jedna cívka
pouze směr |
Obrátí se proud
přes cívky |
|
Rychlostní schopnost |
Mírná rychlost |
lépe
vysokorychlostní výkon |
|
Generování tepla |
Nižší |
Mírně vyšší
pod zátěží |
|
Elektroinstalace
Složitost |
Jednoduché a
přátelský pro začátečníky |
Pokročilejší
nastavení |
|
Modifikace
Povinné |
Žádná úprava
potřebná |
Vnitřní rozvody
nutná úprava |
|
Společný
Aplikace |
Arduino
projekty, vzdělávací systémy, mini automatizace |
CNC projekty,
silnější robotika, výkonnější řízení pohybu |
|
Náklady na nastavení |
Celkově nižší
náklady |
Vyšší řidič
náklady |
|
Snadné použití |
Velmi snadné pro
začátečníky |
Lepší pro
pokročilé uživatele |
|
Celkově vzato
Výkon |
Dobré pro
polohování pro lehkou zátěž |
Lepší točivý moment
a hladší ovládání |
28BYJ-48 Úhel kroku a přesnost rotace
28BYJ-48 se pohybuje v pevných krokových úhlech místo toho, aby se volně otáčel jako běžný stejnosměrný motor.Jeho vnitřní motor má úhel kroku 5,625° a po redukci převodovky se každý výstupní krok výrazně zmenší.To dává motoru jemnější kontrolu nad pohybem hřídele.
Tento krokový pohyb umožňuje motoru dosáhnout opakovatelných poloh s dobrou přesností v projektech s nízkou hmotností.Je to užitečné pro aplikace, jako jsou posuvníky fotoaparátu, chytré zámky, snímače senzorů a malé robotické mechanismy, kde na řízeném pohybu záleží více než na rychlosti.
Režimy Half-Step vs Full-Step v 28BYJ-48
|
Parametr |
Polokrok
Režim |
Úplný krok
Režim |
|
Metoda krokování |
Náhradníci
mezi aktivací single-coil a dual-coil |
Obvykle
napájí dvě cívky najednou |
|
Krokové rozlišení |
vyšší
rozlišení |
Nižší rozlišení |
|
Pohyb
Hladkost |
Hladší
rotace |
Trochu drsnější
pohyb |
|
Pozice
Přesnost |
lépe
přesnost polohování |
Mírný
přesnost polohování |
|
Výstup točivého momentu |
Mírně nižší
průměrný točivý moment |
Vyšší držení
kroutící moment |
|
Úroveň vibrací |
Nižší vibrace |
Vyšší vibrace |
|
Moc
Spotřeba |
Mírný |
Mírně vyšší |
|
Rychlost otáčení |
Pomalejší kvůli
více kroků za otáčku |
Rychleji, protože
je potřeba méně kroků |
|
Úroveň hluku |
Tišší
operace |
Trochu hlasitěji |
|
Ovládání
Složitost |
Složitější
kroková sekvence |
Jednodušší krokování
sekvence |
|
Nejlepší
Aplikace |
Posuvníky fotoaparátu,
přesné polohování, systémy plynulého pohybu |
Základní robotika,
jednoduchá automatizace, aplikace s vyšším točivým momentem |
|
Pohyb
Výkon |
Propracovanější
pohyb |
Silnější, ale
méně hladký pohyb |
Wave Drive vs Full-Step Drive v 28BYJ-48
|
Parametr |
Vlna
Režim jízdy |
Úplný krok
Režim jízdy |
|
Aktivace cívky |
Jedna cívka
najednou pod napětím |
Dvě cívky
současně pod napětím |
|
Výstup točivého momentu |
Nižší točivý moment |
Vyšší točivý moment |
|
Moc
Spotřeba |
Nižší výkon
použití |
Vyšší výkon
použití |
|
Generování tepla |
Nižší teplo |
Vyšší teplo |
|
Pohyb
Síla |
Slabší držení
síla |
Silnější držení
síla |
|
Pozice
Stabilita |
Mírný
stabilitu |
lépe
polohová stabilita |
|
Rotační
Hladkost |
Hladší na nízké úrovni
zatížení |
Mírně
silnější, ale méně hladké |
|
Rychlostní schopnost |
Může dosáhnout
mírně vyšší rychlost při mírném zatížení |
Stabilní rychlost
při větší zátěži |
|
Aktuální
Požadavek |
Nižší proud
poptávka |
Vyšší proud
poptávka |
|
Úroveň vibrací |
Nižší pod
lehké zátěže |
Mírně vyšší
vibrace |
|
Účinnost pod
Načíst |
Méně účinné
pro mechanické zatížení |
Lepší pro
jízda těžších nákladů |
|
Společný
Aplikace |
Nízká spotřeba
projekty, lehké pohybové systémy |
robotika,
polohovací systémy, aplikace s vyšším točivým momentem |
|
Ovládání
Složitost |
Jednoduché krokování
sekvence |
Jednoduché krokování
sekvence |
|
Celkově vzato
Výkon |
Lepší pro
nízkopříkonový provoz |
Lepší pro
silnější a stabilnější pohyb |
Kde využít krokový motor 28-BYJ48
Krokový motor 28-BYJ48 se běžně používá v nízkorychlostních aplikacích přesného řízení, kde je přesné polohování důležitější než vysoký výkon.Protože funguje na 5V a lze jej snadno propojit s Arduino, ESP32, Raspberry Pi a dalšími mikrokontroléry, je široce používán ve výukové elektronice, automatizaci pro kutily a malých robotických systémech.
Jeho vestavěný mechanismus redukce převodů umožňuje motoru poskytovat lepší přesnost polohování a lepší přídržný moment ve srovnání s malými stejnosměrnými motory.Díky tomu je vhodný pro projekty, které vyžadují kontrolovaný rotační pohyb namísto kontinuálního vysokorychlostního předení.
Mezi běžné aplikace patří automatické závěsové systémy, chytré dveřní zámky, posuvné kamery, otočné a naklápěcí plošiny, robotická ramena, malé dopravníkové mechanismy a snímací zařízení.Často se také používá v hobby CNC prototypech, 3D tištěných mechanismech a demonstračních projektech pro výuku ovládání krokových motorů.
Jak propojit 28-BYJ48 s Arduinem
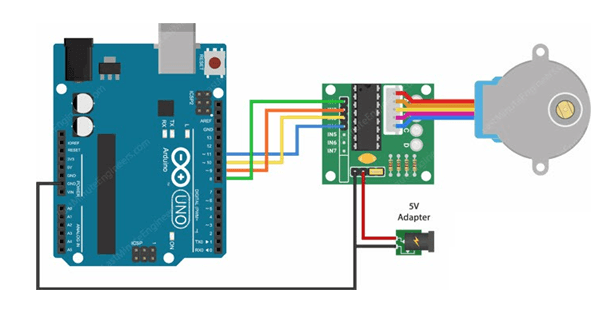
Krokový motor 28-BYJ48 je běžně připojen k Arduinu pomocí desky ovladače ULN2003.Řídicí deska ovládá cívky motoru a poskytuje požadovaný proud pro stabilní provoz.
Připojení vodičů
|
2003 ULN
Pin řidiče |
Arduino
Pin |
|
IN1 |
D8 |
|
IN2 |
D9 |
|
IN3 |
D10 |
|
IN4 |
D11 |
|
GND |
GND |
|
VCC |
5V |
Krokový motor se zapojuje přímo do bílého konektoru na desce ULN2003.Pro spolehlivější výkon motoru se doporučuje samostatný 5V adaptér.
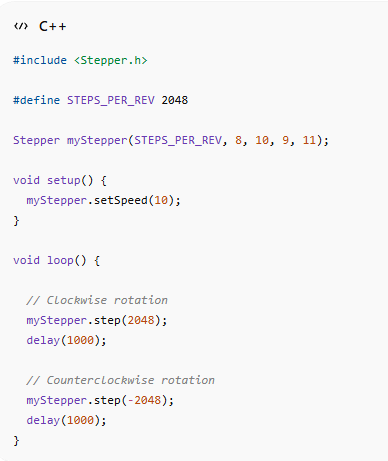
Příklady kódu Arduino pro 28-BYJ48
Tento program otočí motor o jednu celou otáčku ve směru hodinových ručiček, zastaví se na jednu sekundu a poté jej otočí o jednu celou otáčku proti směru hodinových ručiček.
28-BYJ48 s ESP32 a Raspberry Pi
Krokový motor 28-BYJ48 lze také ovládat pomocí desek ESP32 a Raspberry Pi, takže je užitečný pro systémy IoT, robotiku, automatizační projekty a chytrá zařízení.Protože motor vyžaduje více proudu, než může kolík GPIO bezpečně dodat, je normálně připojen přes desku ovladače ULN2003.Ovladač přijímá řídicí signály z mikrokontroléru nebo jednodeskového počítače a spíná cívky motoru ve správném krokovém pořadí.
Kompatibilita s ESP32
ESP32 je plně kompatibilní s krokovým motorem 28-BYJ48 a běžně se používá v projektech bezdrátové automatizace, protože podporuje připojení Wi-Fi i Bluetooth.Piny GPIO na ESP32 mohou přímo ovládat vstupy ovladače ULN2003, což umožňuje přesný pohyb krokového motoru pro aplikace, jako jsou chytré závěsy, robotické systémy, posuvníky kamer a polohovací zařízení IoT.
Protože ESP32 pracuje na logických úrovních 3,3 V, deska ovladače ULN2003 pomáhá zajistit správné přepínání proudu pro cívky motoru.Mnoho vývojářů používá knihovny Arduino IDE, jako jsou Stepper nebo AccelStepper, při programování ESP32 pro plynulejší zrychlení motoru a řízení rychlosti.
Způsoby ovládání Raspberry Pi
Raspberry Pi může také ovládat 28-BYJ48 prostřednictvím svých pinů GPIO pomocí desky ovladače ULN2003.Knihovny Pythonu jako RPi.GPIO nebo gpiozero se běžně používají ke generování krokovací sekvence potřebné pro otáčení motoru.Toto nastavení je oblíbené v automatizačních systémech, otočných a naklápěcích kamerách, systémech snímání senzorů a robotických projektech založených na Linuxu.
Na rozdíl od desek Arduino nebo ESP32 běží na Raspberry Pi plný operační systém, díky čemuž je vhodný pro pokročilejší aplikace zahrnující sítě, zpracování kamer, webové servery nebo dálkové ovládání motoru.
Požadavky na GPIO
Motor obvykle vyžaduje čtyři výstupní piny GPIO pro ovládání čtyř vstupních kanálů ULN2003.Tyto piny GPIO vysílají postupně digitální signály HIGH a LOW, aby se hřídel motoru otáčela krok za krokem.Desky ESP32 i Raspberry Pi poskytují dostatek GPIO pinů pro tento typ ovládání.
Je důležité nepřipojovat cívky motoru přímo k pinům GPIO, protože proud motoru překračuje bezpečné limity GPIO.Ovladač ULN2003 chrání ovladač a zároveň poskytuje dostatečné zesílení proudu pro stabilní provoz.
Úvahy o napětí
Standardní motor 28-BYJ48 je určen pro provoz 5V DC.Přestože desky ESP32 a Raspberry Pi používají nižší logická napětí, deska ovladače ULN2003 umožňuje bezpečné propojení mezi ovladačem a motorem.
Pro stabilní provoz se doporučuje externí 5V zdroj namísto napájení motoru přímo z vývojové desky.Nedostatečný výkon může způsobit slabý točivý moment, vynechané kroky, vibrace nebo nestabilní pohyb motoru.Uzemnění externího zdroje by mělo být vždy připojeno k zemi regulátoru, aby byla zajištěna správná reference signálu.
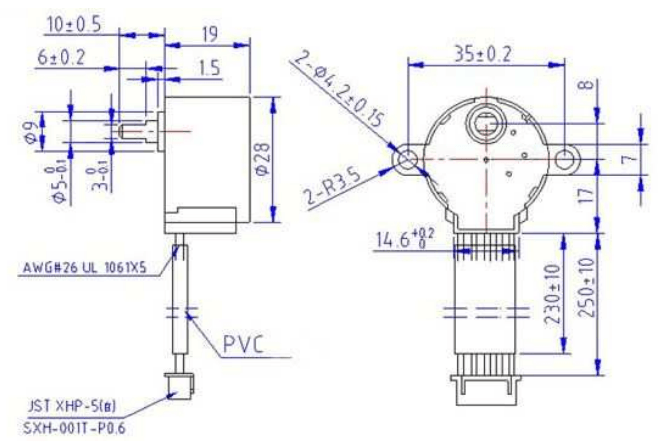
28-BYJ48 Mechanické rozměry
Závěr
Krokový motor 28BYJ-48 5V provoz, kompaktní velikost, vestavěná převodovka a kompatibilita s běžnými řídicími deskami z něj dělají ideální zařízení pro začátečníky a hobby uživatele elektroniky.Není však určen pro velké zatížení nebo vysokorychlostní pohyb.Pro silnější aplikace, jako jsou CNC stroje, 3D tiskárny nebo větší robotika, jsou lepší motory jako NEMA 14 nebo NEMA 17.Celkově se 28BYJ-48 nejlépe používá pro lehkou automatizaci, výukové projekty a přesný pohyb nízkou rychlostí.
Často kladené otázky [FAQ]
1. Proč 28BYJ-48 používá převodovku místo přímého motorového pohonu?
28BYJ-48 používá vnitřní převodovku 1:64 pro zvýšení točivého momentu a zlepšení přesnosti polohování.Bez převodovky by se malý vnitřní motor otáčel příliš rychle s nižším kroutícím momentem.Redukční převody pomáhají motoru pohybovat se pomalu a přesně, takže je vhodný pro automatizační a polohovací systémy.
2. Proč je deska ovladače ULN2003 důležitá pro 28BYJ-48?
Deska ovladače ULN2003 funguje jako proudový zesilovač mezi mikrokontrolérem a motorem.Piny GPIO Arduino, ESP32 a Raspberry Pi nemohou bezpečně poskytnout dostatek proudu k přímému pohonu cívek motoru.ULN2003 správně spíná cívky a zároveň chrání regulátor před přetížením.
3. Čím se 28BYJ-48 liší od běžného stejnosměrného motoru?
Běžný stejnosměrný motor se nepřetržitě otáčí po připojení napájení, zatímco 28BYJ-48 se otáčí v kontrolovaných krokových pohybech.Tato operace krok za krokem umožňuje přesné polohování, což je důležité v robotice, inteligentních zámcích, posuvných kamerách a automatizačních systémech.
4. Jaká jsou omezení krokového motoru 28BYJ-48?
Motor není určen pro vysokorychlostní nebo vysoce zatěžované aplikace.Jeho převodovka zlepšuje točivý moment, ale snižuje rychlost.Při velkém mechanickém zatížení může motor chybět kroky nebo ztratit přesnost polohování ve srovnání se silnějšími motory, jako je NEMA 17.
5. Lze 28BYJ-48 použít pro aplikace s kontinuální rotací?
Ano, motor se může otáčet nepřetržitě, pokud se sekvence krokování neustále opakuje.Je však optimalizován pro řízený pohyb nízkou rychlostí spíše než pro rychlé nepřetržité odstřeďování, takže nejlépe funguje v polohovacích aplikacích.
6. Proč některé motory 28BYJ-48 vibrují nebo se nedaří správně otáčet?
Mezi běžné příčiny patří nedostatečný napájecí proud, nesprávné pořadí zapojení, nestabilní krokové signály nebo nadměrné zatížení.Použití externího regulovaného 5V napájecího zdroje často zlepšuje stabilitu a výkon točivého momentu.
8. Jak režim polovičního kroku zlepšuje výkon 28BYJ-48?
Režim polovičního kroku střídá aktivaci s jednou a dvěma cívkami, čímž se dosáhne plynulejšího pohybu a vyššího polohového rozlišení.To pomáhá snižovat vibrace a zlepšuje přesnost pohybu v citlivých aplikacích.
Související článek
-
![Základy, struktura a provozní charakteristiky MOSFET]() May 12 2026Základy, struktura a provozní charakteristiky MOSFET
May 12 2026Základy, struktura a provozní charakteristiky MOSFETMOSFETy jsou jednou z nejdůležitějších součástí moderních elektronických obvodů.Používají se k řízení proudu, zapínání a vypínán... -
![Vysvětlení grafické karty: Jak fungují GPU v moderních počítačích]() May 11 2026Vysvětlení grafické karty: Jak fungují GPU v moderních počítačích
May 11 2026Vysvětlení grafické karty: Jak fungují GPU v moderních počítačíchGrafická karta řídí způsob zpracování a zobrazení vizuálního obsahu.Tento článek se bude zabývat tím, co je grafická karta, jak grafick...
Související produkty

GRM31CR61H106KA12L
CAP CER 10UF 50V X5R 1206

GRT155C8YA224ME01D
CAP CER 0.22UF 35V X6S 0402
06033C331KAT2A
CAP CER 330PF 25V X7R 0603

AUIRFR8403
AUIRFR8403 - 20V-40V N-CHANNEL A

EP1S80F1020C6N
IC FPGA 773 I/O 1020FBGA

DSP25-12A
DIODE ARRAY GP 1200V 28A TO247AD
MT6188C/C
MT6188C/C MTK

LP8552TLX-E01/NOPB
PROTOTYPE
IRS2336DJ
IRS2336DJ IR
BCR108SH6327
SMALL SIGNAL BIPOLAR TRANSISTOR

LFXP6C-4F256C-3I
LFXP6C-4F256C-3I LATTICE
SST25VF032B-50-4C-SCF
SST25VF032B-50-4C-SCF SST

VT382BFCX-ADJ-001
IC REG LINEAR ADJ